
รูปแบบอีเมลผิดพลาด
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


strcture เฉพาะของเซอร์โว
2024-04-29 16:44:08
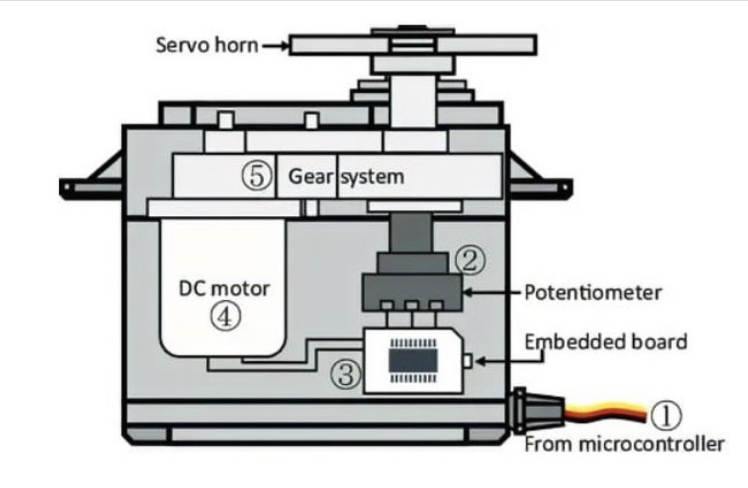
โครงสร้างเฉพาะของเซอร์โวมีดังนี้:
①: สายสัญญาณ: รับสัญญาณควบคุมจากไมโครคอนโทรลเลอร์;
②: โพเทนชิออมิเตอร์: สามารถวัดตำแหน่งของเพลาเอาท์พุทซึ่งเป็นของ
ข้อเสนอแนะส่วนหนึ่งของกลไกเซอร์โวทั้งหมด;
③: ตัวควบคุมภายใน: การประมวลผลสัญญาณจากการควบคุมภายนอกขับมอเตอร์และ
การประมวลผลสัญญาณตำแหน่งข้อเสนอแนะเป็นแกนกลางของกลไกเซอร์โวทั้งหมด
④: มอเตอร์: ในฐานะแอคทูเอเตอร์ความเร็วแรงบิดตำแหน่งเท่าไหร่ตำแหน่งคือเอาต์พุต;
⑤: กลไกการส่งสัญญาณ/ระบบเซอร์โว: กลไกนี้ปรับสต๊อกเอาท์พุทของ
มอเตอร์ไปยังมุมเอาท์พุทสุดท้ายตามอัตราส่วนการส่งผ่านที่แน่นอน
เอาต์พุตของเซอร์โวถูกควบคุมโดยการส่งสัญญาณ PWM ไปยังสายสัญญาณของเซอร์โว
①: สายสัญญาณ: รับสัญญาณควบคุมจากไมโครคอนโทรลเลอร์;
②: โพเทนชิออมิเตอร์: สามารถวัดตำแหน่งของเพลาเอาท์พุทซึ่งเป็นของ
ข้อเสนอแนะส่วนหนึ่งของกลไกเซอร์โวทั้งหมด;
③: ตัวควบคุมภายใน: การประมวลผลสัญญาณจากการควบคุมภายนอกขับมอเตอร์และ
การประมวลผลสัญญาณตำแหน่งข้อเสนอแนะเป็นแกนกลางของกลไกเซอร์โวทั้งหมด
④: มอเตอร์: ในฐานะแอคทูเอเตอร์ความเร็วแรงบิดตำแหน่งเท่าไหร่ตำแหน่งคือเอาต์พุต;
⑤: กลไกการส่งสัญญาณ/ระบบเซอร์โว: กลไกนี้ปรับสต๊อกเอาท์พุทของ
มอเตอร์ไปยังมุมเอาท์พุทสุดท้ายตามอัตราส่วนการส่งผ่านที่แน่นอน
เอาต์พุตของเซอร์โวถูกควบคุมโดยการส่งสัญญาณ PWM ไปยังสายสัญญาณของเซอร์โว
ติดต่อเรา
แท็กสินค้า
ติดต่อเรา
กรุณาให้คำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง